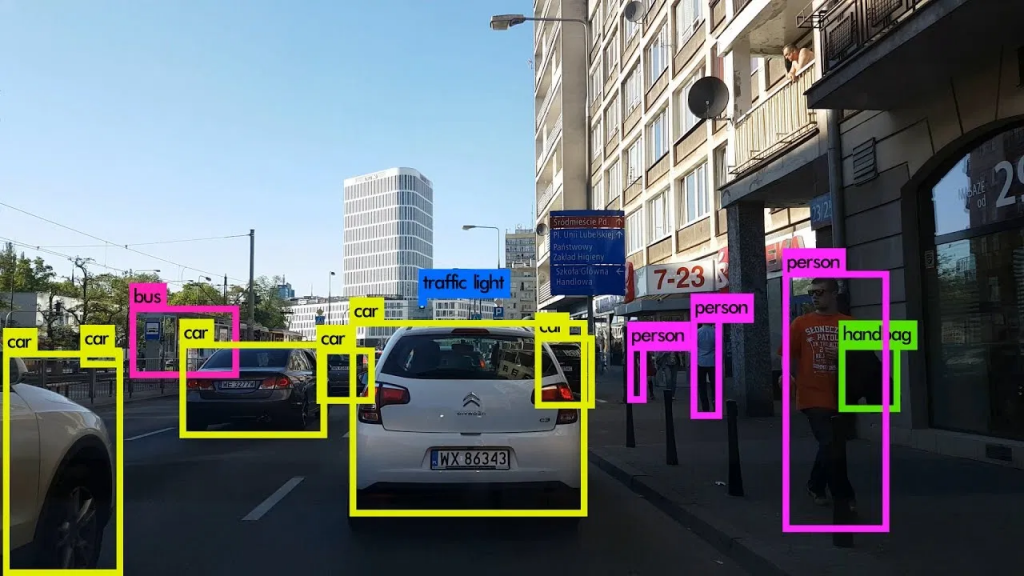
Optical recognition technology will recognize real life objects and make it possible to store the data. Our mission is not to reinvent optical recognition, but to concentrate on Extract, Transform, Load (ETL) process into the Azure cloud. We want to be able to discover certain objects (lego men) during the drone flight, and perform certain actions if those objects are discovered (eg. send Vipps invoice as a matter to repay for being unable to hide from drone).
Lego Object recognition
As a minimum, we want to be able to detect lego men and be able to run an action if any objects of this type are present. That is a simple task, requires no connection to any form of table/db.
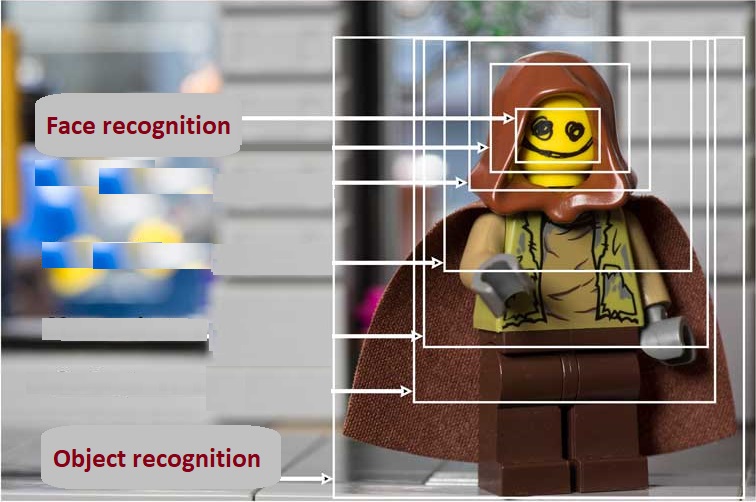
What is the top bar for the scope of this run, is to be able to distinguish between different Lego men, either by face recognition (that is a very high expectation), or just color/object recognition
In the end: we want our drone to be able to collect optical data, transfer it to the Azure, compare with any existing data in the table/database and make a base for a report.
(Diagram coming later)
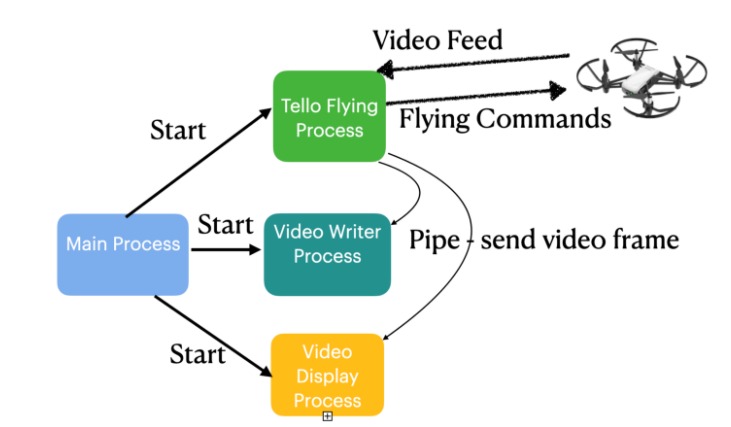
Drone 1st flight – operated through code
Connecting to the drone has been a small challenge in itself, but with that behind us, we’re moving forward.
Here we are trying to control the Drone using Code, for this purpose we have selected Python as our coding language.
So while flying the drone, It will capture the Video and Images of the objects like Legos.